小米扫地机器人
控制部分采用了Allwinner ARM Cortex-A7架构 + ARM Cortex-M3架构。

- 黄框美光MT41K256M16TW-107 DDR3LSDRAM
- 橙框AXP223电源系统管理芯片
- 红框东芝THGBMDG5D1LBAIL 4GB se-MMC
- 绿框RTL8189ETV无线模块

- STM32F103VET6
iRobo780扫地机器人

- STM8S207
小米AI音响

- Amlogic A112
日本Pepper机器人

- CPU Intel Atom
Alpha 1s

- 芯片被涂抹 暂时估计是STM32系列
Kiva 物流机器人

- Lattice LFXP6C FPGA
- Freescale MPC5123 (可能运行PowerPC Linux)
MiPosaur Robot

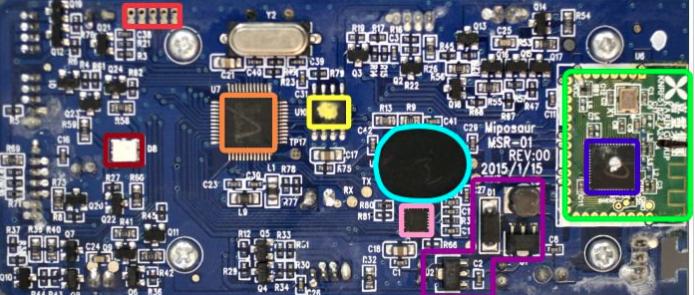
- Nuvoton NM05716LDN(Cortex-M0)
科大讯飞 XFMT101 离线语音识别模块
- AP8064 Audio Application Processor (ARM Cortex-M3 based)
